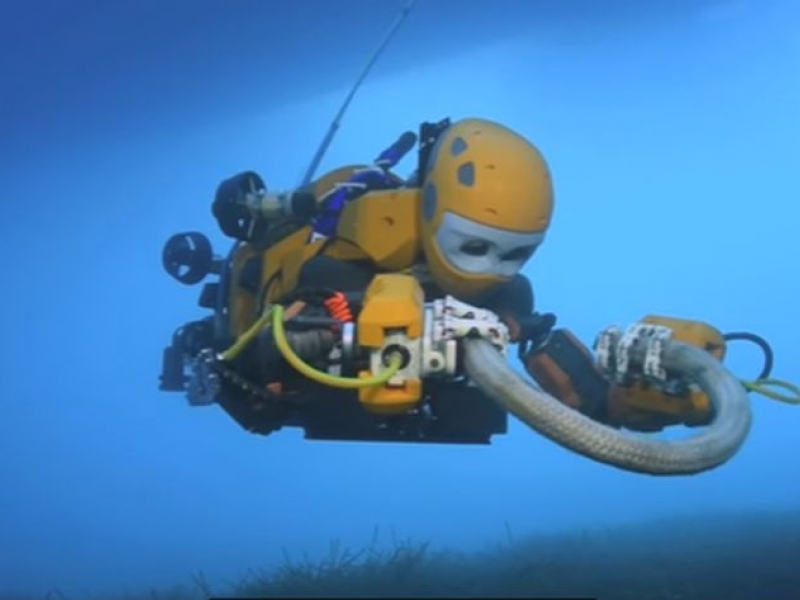
Учени от Станфордския университет са създали хуманоиден робот-водолаз, способен да изпълнява задачи с различна сложност на голяма дълбочина. Първата мисия на роботът русалка на име OceanOne, е изващдането на съкровищата от дъното на Средиземно морското, съобщава сайтът на университета, пише nauka.offnews.bg.
Флагманът на крал Луи XIV потъва през 1664 г. на 20 мили край южния бряг на Франция и лежи на дълбочина от 100 метра. Досега хората не успявахa да се доберат до кораба, за да разследват останалите на борда съкровища и артефакти. OceanOne, управляван от ръководителя на мисията, професорът по компютърни науки в Станфордския Осама Хатиб, открива на кораба древна ваза с размерите на грейпфрут и успешно да я доставя на изследователския кораб.
Хатиб се надява, че в бъдеще роботът ще може да се използва за висококвалифицирани задачи, които са твърде опасни за водолазите. Това ще бъде нов етап в изследването на дъното на океана. Например може да обслужва нефтени платформи или подводни извънредни ситуации като катастрофата във Фукушима в Япония.
Идеята за OceanOne е родена от необходимостта да се изучават кораловите рифове, които се намират дълбоко в Червено море, доста под удобния за работа диапазон за водолазите. Никоя от съществуващите роботизирани подводници не може да се гмурка с умението и прецизността на човека, а OceanOne е проектиран като добра комбинация от роботика, изкуствен интелект и тактилни сензорни системи за обратна връзка.
Дължината на OceanOne е около 1,5 метра, главата е оборудвана със стереоскопично зрение, което показва на пилота всичко, което вижда роботът, два манипулатора, които точно повтарят всички движения на човешките ръце. В опашката е батерията, компютрите и осем, действащи в различни посоки тласкащи устройства.
Това, което отличава манипулаторите на OceanOne е, че са оборудвани със сензори за съпротивление на материала, които предават тактилна обратна връзка на пилота, така че хората могат да почувстват дали роботът е хванал нещо твърдо и тежко или леко и деликатно. Компютърът изчислява силата на натиск, която упражнява роботът, така че да не се повреждат предметите.
Специални сензори и двигатели позволяват на OceanOne да се задържа в определена позиция, въпреки теченията, както и да избягват сблъсъци. Ако роботът "усети", че двигателите не го забавят достатъчно бързо, той може да се приготви за удар, държейки напред ръцете си, както правят хората.
Хуманоидната форма на робот също така позволява когато OceanOne се гмурка с хора, пилотът му да може да комуникира с другите водолази, използвайки жестове с ръце по време на изпълнение на трудни задачи или научни експерименти.
TrafficNewS.bg


Акценти
Виж всички

Почина българската народна певица Янка Рупкина

Законът е за всички… освен за тези, които го прилагат ВИДЕО





Темите на Traffic News